CHALLENGE
Endovascular interventions are essential in treating vascular diseases and often involve intricate techniques using guidewires and catheters. Whilst less invasive than traditional surgeries, these procedures pose challenges with a reliance on X-ray imaging, which introduces risks for radiation exposure and the need for high surgical skill due to limited feedback and visualisation.
Another limitation within the rapidly advancing field of robotic surgery and semi-autonomous catheterisation is the widespread use of closed-source simulators and physical phantoms.
Additionally, acquiring the necessary data for such research often involves considerable financial and temporal investments due to complicated medical procedures.
SOLUTION
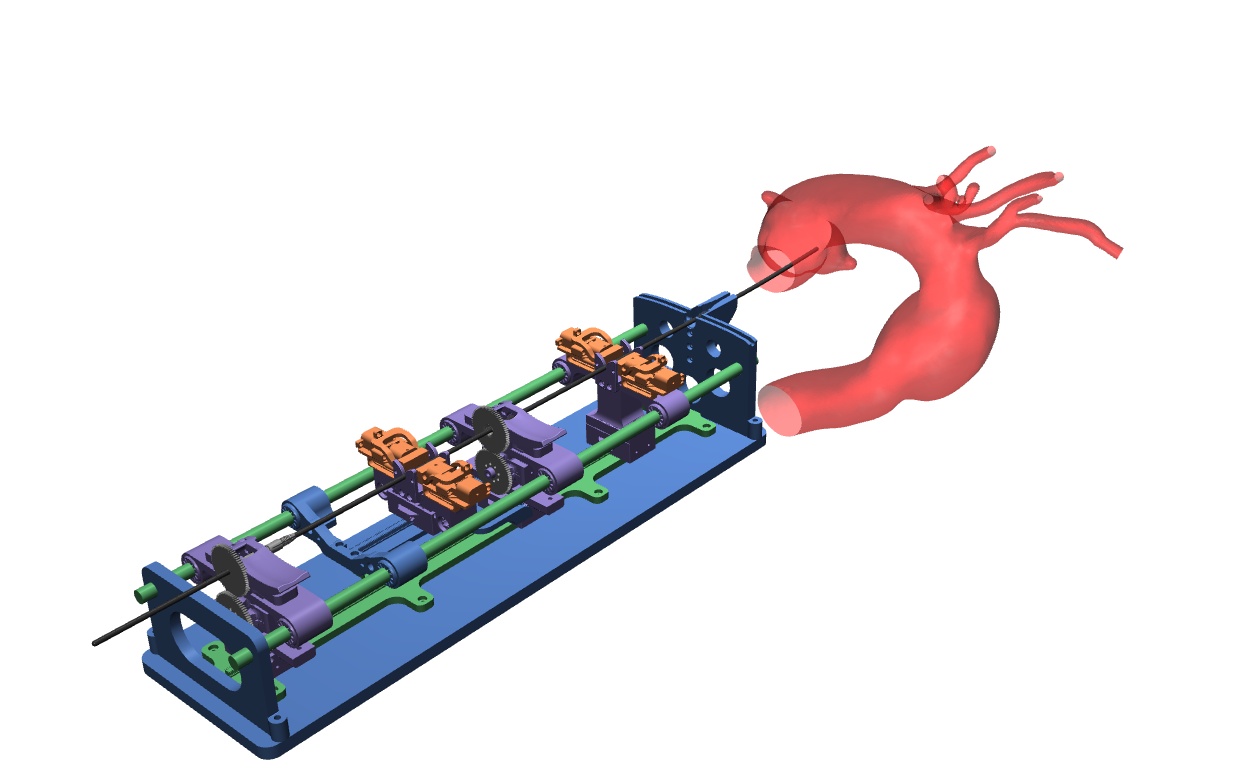
To address these limitations, the Smart Lab teams introduced CathSim, an open-source and real-time simulator for endovascular intervention.
It is uniquely designed for training machine learning algorithms, setting a new standard in medical simulation.
CathSim’s cutting-edge machine learning techniques allows for more comprehensive simulations with anatomically precise aortic and arch models. Its high-fidelity 3D representations provide a realistic experience that is also compatible with AR/VR, enriching learning frameworks for both expert and novice medical professionals alike.
As medical education moves towards a technology-driven future, CathSim provides a user-friendly and dynamic platform for surgical training, algorithm development, and research.
It’s a vital tool in the ever-evolving landscape of endovascular healthcare, offering a risk-free and technologically advanced environment for skill enhancement and innovation.
CathSim’s emphasis on sample efficiency, enables rapid development and testing of learning algorithms. The University of Liverpool teams validate the CathSim with real robotic experiments, achieving impressive performance.
The development of a multi-modal expert navigation network proves its effectiveness in downstream endovascular navigation tasks.
The results suggest that CathSim holds great potential to expedite research in the field of autonomous endovascular navigation systems, which aims to enable remote control of surgeries and procedures, reducing surgeons’ exposure to repetitive radiation.
IMPACT
Future plans for the project are centered around leveraging specialised facilities to generate open-source datasets, pivotal for advancing research.
working closely with local hospitals and surgeons, the teams are hoping to collate specific data and gain unique access to scanning equipment that can support the testing and validation processes.
Additionally, the project aims to foster innovation and collaboration by organising competitions that will engage the research community. These efforts are directed towards bringing forward autonomy, whilst concurrently enhancing and expanding the capabilities of the simulation environment.
Winner of Best Paper Award – International Conference on Robot Intelligence Technology and Applications – 2023
This is a collaborative project between the University of Liverpool (Department of Computer Science and the Department of Mechanical, Materials & Aerospace Engineering), The Imperial College London (The Hamlyn Centre for Robotic Surgery and Taiwan and the Mechatronics in Medicine Lab), the Automation & Control Institute (ACIN) in Austria, and the Department of Computer Science at the National Tsing Hua University.
